Режим пид регулирования zont настройка
ПИД-регулятор. Методика настройки
2020-07-10  Промышленное
Промышленное  12 комментариев
12 комментариев
ПИД-регулятор (пропорционально-интегрально-дифференциальный) — устройство, с обратной связью, применяемое в автоматических системах управления для поддержания заданного значения параметра. Благодаря своей универсальности они широко применяются в различных технологических процессах.

Выходной сигнал регулятора определяется по следующей формуле:
u (t) = P + I + D = Kp e (t) + Ki ∫e (t) dt + Kd de (t)/dt
u (t) – выходной сигнал регулятора;
P – пропорциональная составляющая;
I – интегрирующая составляющая;
D – дифференцирующая составляющая;
Kp — пропорциональный коэффициент
Ki — интегральный коэффициент
Kd – дифференциальный коэффициент
e (t) – ошибка рассогласования
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Чем меньше значение гистерезиса, тем точнее будет процесс регулирования, но увеличивается частота срабатывания ,что в конечном итоге приводит к износу коммутационных аппаратов. Увеличение гистерезиса уменьшит частоту переключений, но при этом увеличивается амплитуда колебаний регулируемого параметра, что приведет к ухудшению точности регулирования.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Для того, чтобы правильно выбрать необходимый тип регулятора необходимо хотя бы приблизительно знать характеристики управляемого объекта , требования к точности регулирования, характер возмущений, воздействующих на объект регулирования.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)
- Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются:
- Постоянная интегрирования устанавливается минимально возможной (Ти =0),
- Постоянная дифференцирования минимально возможной (Тд = 0).

Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
- Меняем значение пропорциональной составляющей Xp от минимума (0) до момента, пока не появятся устойчивые колебания системы с периодом ∆t.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Вывод
Благодаря достаточно высоким получаемым результатам ПИД-регуляторы нашли широкое применение в системах автоматического управления.
При этом важно подчеркнуть, что настройка ПИД-регулятора является процессом довольно трудоемким и требует определенных знаний и индивидуального подхода для различных объектов управления.
Настройка ПИД-регулятора преобразователя частоты
Функция ПИД-регулирования может использоваться при управлении процессами поддержания давления, расхода, температуры и т.п. Блок-схема частотно-регулируемого электропривода с ПИД-регулированием приведена на рис. 1.
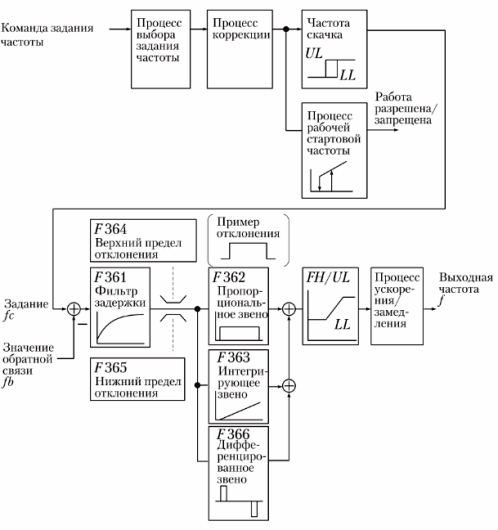
Рис. 1. Блок-схема ПИД-регулирования
Производится в соответствии с требованиями управляемой системы, сигналом задания и сигналом обратной связи. Подробно процедура настройки излагается в инструкции по эксплуатации конкретного преобразователя частоты.
Настраиваемые параметры для ПИД-регулирования приведены в табл. 1.
Таблица 1. Настраиваемые параметры ПИД-регулирования
| Название | Диапазон настройки |
| Фильтр задержки | 0 — 255 |
| Коэффициент пропорциональности (П) | 0,01 — 100 |
| Коэффициент интегрирования (И) | 0,01 — 100 |
| Верхний предел отклонения | 0 — 50 |
| Нижний предел отклонения | 0 — 50 |
| Коэффициент дифференцирования (Д) | 0 — 2,55 |
Настройка пропорционального звена
Пропорциональное звено (П) усиливает отклонение (разницу между заданием и сигналом обратной связи), чтобы ввести коррекцию для регулирования пропорционально отклонению. При увеличении его значения реакция на управляющее воздействие ускоряется, но чрезмерное увеличение коэффициента пропорциональности может вызвать нестабильную работу и колебания (рис. 2).
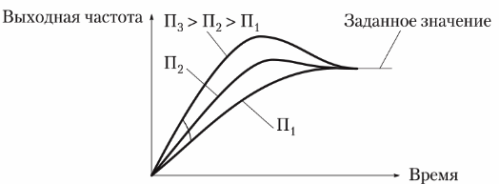
Рис. 2. Настройка пропорционального звена (П-звена) ПИД-регулятора
Настройка интегрирующего звена
Интегрирующее звено (И) сводит к нулю остаточное отклонение после пропорционального звена. Чем больше коэффициент интегрирования, тем меньше остаточное отклонение, но чрезмерное увеличение может вызвать нестабильную работу и колебания (рис. 3).
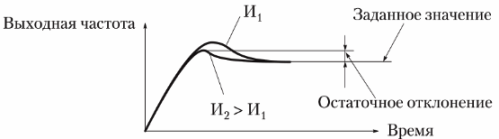
Рис. 3. Настройка интегрирующего звена (И-звена) ПИД-регулятора
Настройка дифференцирующего звена
Дифференцирующее звено (Д) улучшает реакцию системы, когда отклонения быстро меняются. Однако чрезмерное увеличение коэффициента дифференцирования может вызвать колебания выходной частоты.
Настройка фильтра задержки
Фильтр задержки предназначен для сдерживания быстро изменяющихся отклонений (звено запаздывания первого порядка). Если уменьшить задержку, процесс ускорится, и наоборот (рис. 4).
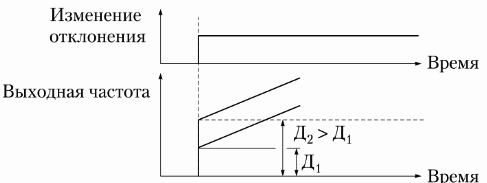
Рис. 4. Настройка фильтра задержки
Настройка сигнала обратной связи
Выбор сигнала ПИД-регулирования позволит указать источник сигнала обратной связи. При использовании аналогового входа устанавливают нулевое значения сигнала обратной связи в соответствие с частотой 0 Гц, а максимальное значение — соответствующее максимальной частоте. К примеру, в случае использования сигнала 4 — 20 мА устанавливают 20 % для 0 Гц и 100 % для максимальной частоты.

Настройка сигнала задания
Значение задания используется как команда задания частоты, установленная с помощью функции выбора задания скорости. Значение задания частоты задается как значение технологического параметра, к которому будет стремиться значение обратной связи. Задание также может быть установлено с помощью предустановленных скоростей.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
ПИД РЕГУЛИРОВАНИЕ НА ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЯХ M-DRIVER!
 В данной статье мы подробно рассмотрим возможности ПИД регулирования частотных преобразователей M-DRIVER, а также где применяется данное регулирование и какие способы управления заложены в преобразователях M-Driver. Прежде всего частотный преобразователь это многофункциональное устройство способное производить регулирование скорости двигателя по разным технологическим параметрам (давление, перепад, расход и т.п.). Частотные преобразователи M-Driver имеют аналоговые входа к которым соответственно и подключаются датчики измерения параметров. Аналоговый вход AI1 поддерживает только вход с унифицированным сигналом 0-10В, а вход AI2 может иметь сигнал 0-10В или 0/4-20мА (заводское значение).
В данной статье мы подробно рассмотрим возможности ПИД регулирования частотных преобразователей M-DRIVER, а также где применяется данное регулирование и какие способы управления заложены в преобразователях M-Driver. Прежде всего частотный преобразователь это многофункциональное устройство способное производить регулирование скорости двигателя по разным технологическим параметрам (давление, перепад, расход и т.п.). Частотные преобразователи M-Driver имеют аналоговые входа к которым соответственно и подключаются датчики измерения параметров. Аналоговый вход AI1 поддерживает только вход с унифицированным сигналом 0-10В, а вход AI2 может иметь сигнал 0-10В или 0/4-20мА (заводское значение).
Рассмотрим одну из стандартных задач частотного преобразователя — поддержание заданного давления воды в трубопроводе многоэтажного дома. Давление в трубопроводах постоянно меняется в зависимости от потребности воды в разные промежутки времени. Так например, в утреннее время потребление воды высокое, а в ночное минимальное. В обычном случае (без частотного преобразователя) двигатель работает постоянно, а регулирование давление производится автоматическими или ручными клапанами (задвижками). Частотный преобразователь решает сразу несколько задач:
- уменьшает потребление электроэнергии, т.к. двигатель работает не на полную мощность или вообще отключается
- поддержание точного заданного давления с помощью ПИД регулирования
- защита двигателя от перегрузок, потери фазы и т.п.
- плавный пуск и останов двигателя (защита от пусковых токов и гидроударов)
- автоматическое управление не требующее оператора
Настройка ПИД регулирования на частотных преобразователях M-Driver происходит в несколько этапов:
1) В первую очередь необходимо задать параметры двигателя в частотный преобразователь. Для этого в параметрах P1-00 — P1-05 необходимо ввести данные с шильдика двигателя.
2) Следующим этапом выбираем скалярный закон управления P0-01=2.
3) В параметре P0-03=8 — задание от ПИД регулятора.
4) Выбираем управление частотным преобразователем в параметре P0-02=1 — с клемм дискретных входов. При этом необходимо конфигурировать параметры P4-00 — P4-04 при необходимости. Самым простым решением будет P4-00 = 1 — команда ПУСК при поступлении сигнала на DI1. Возможно также производить настройку по шине данных Modbus. В этом случае нужно в параметре P0-02 выбрать значение 2.
5) Для более эффективной работы частотного преобразователя рекомендуем настроить следующие параметры:
P0-17 = 3-4 сек (время разгона двигателя)
P0-18 = 3-4 сек (время останова двигателя)
P6-10 = 1 (остановка двигателя по инерции, естественным способом)
P0-14 = 20Гц (ограничение нижнего предела частоты, для предотвращения работы двигателя на низких частотах)
PA-08 = 0 (данный параметр необходимо изменять на значение 0, если Вы используете режим «сна» и Вам необходимо чтобы при «просыпании» стартовая частота двигателя была равна P0-14)
Настройка ПИД регулятора в частотном преобразователе M-Driver реализована максимально просто и эффективно. Для правильной работы ПИД регулятора на частотном преобразователе необходима обратная связь, по которой будет происходить сравнение значений с уставкой ПИД регулятора. В качестве обратной связи мы будем использовать датчик давления с унифицированным сигналом 4-20мА и подключать его к аналоговому входу частотного преобразователя AI2. Мы рекомендуем выбирать именно датчики с токовым сигналом (0/4-20мА), так как они менее подвержены наводкам и потерям на дальние расстояния, чем датчики с унифицированным сигналом 0-10В.
1) В параметре PA-00 выбираем задание уставки ПИД. Если PA-00 = 0, то происходит задание через параметр PA-01. В параметре PA-01 задается значение от 0 до 100% от диапазона датчика. Если аналоговый датчик давления 4-20мА имеет диапазон от 0 до 10 бар, то соответственно заданная уставка в параметре PA-01 = 40% будет соответствовать 4 бар. Также в параметре PA-00 могут быть выбраны другие значения, например «Задание по шине данных Modbus RTU, значение 5». В этом случае задание для ПИД будет выбираться не в параметре PA-01, а задаваться по протоколу Modbus RTU от других устройств (контроллер, панель HMI, SCADA и т.п.).
2) В параметре PA-02 = 1, выбираем обратную связь ПИД по аналоговому входу AI2, к которому и подключен наш аналоговый датчик давления 4-20мА.
3) Следующим пунктом настраиваем параметр PA-03 = 0 (направление ПИД вперед). Когда обратная связь ПИД (показания с датчика) меньше задания ПИД, то частотный преобразователь увеличивает частоту. Соответственно, если выбрать PA-03 = 1 (обратное направление ПИД), то процесс регулирования частоты будет обратный. Когда обратная связь ПИД меньше задания ПИД, то частотный преобразователь будет уменьшать частоту.
4) Если аналоговый датчик давления используется с унифицированным входом 4-20мА, то его необходимо откалибровать, так как вход AI2 на частотном преобразователе рассчитан на сигнал 0-20мА.
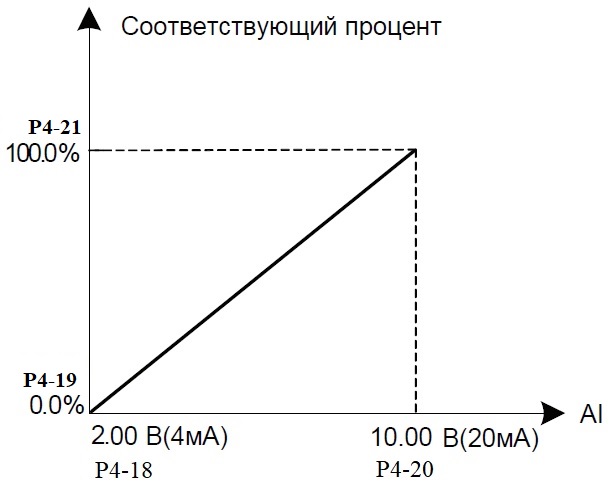 P4-18 = 2 (минимальное значение кривой AI2)
P4-18 = 2 (минимальное значение кривой AI2)
P4-19 = 0 (процент минимального значения кривой AI2)
P4-20 = 10 (максимальное значение кривой AI2)
P4-21 = 100 ( процент максимального значения кривой AI2)
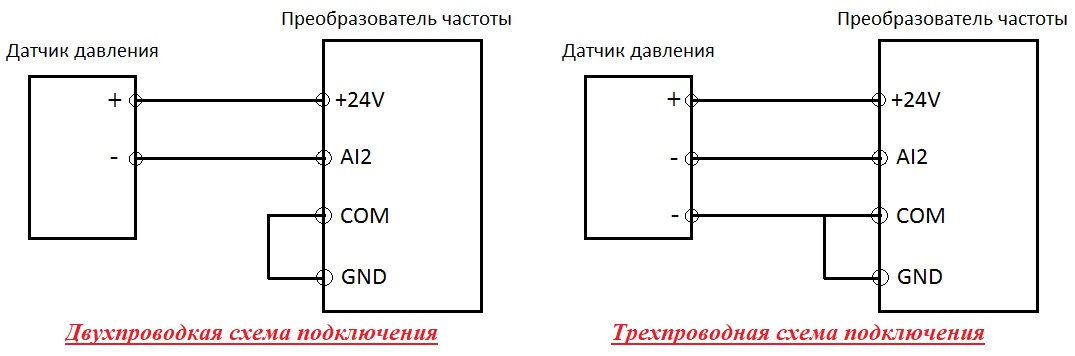
Таким образом будет производиться смещение начальной точки аналогово входа AI2 c 0мА на 4мА. Если Вам необходимо использовать датчик с унифицированным входом 0-10В, то Вы можете его подключить к обоим аналоговым входам AI1 и AI2. Так как с завода AI2 сконфигурирован на унифицированный сигнал 0-20мА, то поменять его можно с помощью джампера JP2 (1-2 положение 0-10В, 2-3 положение 0-20мА). Частотные преобразователи M-Driver имеют встроенный блок питания на 24В DC, к которому возможно производить подключение данных датчиков. Аналоговые датчики давления имеют как правило двух или трехпроводную схему подключения. Подключение датчика по двухпроводной схеме к аналоговому входу AI2 происходит следующим образом: + датчика давления подключается к +24В частотного преобразователя, — датчика давления к аналоговому входу AI2, а между контактами GND и COM делается перемычка.
 Частотные преобразователи M-Driver при правильной конфигурации могут обеспечивать до 30% экономии электроэнергии. Для поддержания определенного давления порой достаточно поддерживать минимальную скорость двигателя, либо производить его отключения на небольшие промежутки времени, тем самым позволяя значительно экономить электроэнергию. В частотных преобразователях M-Driver реализована функция «сна», которая позволяет отключать частотный преобразователь на низких частотах, обеспечивая экономию электроэнергии и снижение нагрузки с обмоток двигателя (на низких частотах) и частотного преобразователя. При понижении давления в системе ниже заданного уровня частотный преобразователь выходит из режима «сна» и продолжает работу. Для настройки режима «сна» на частотном преобразователе необходимо запараметрировать следующие параметры:
Частотные преобразователи M-Driver при правильной конфигурации могут обеспечивать до 30% экономии электроэнергии. Для поддержания определенного давления порой достаточно поддерживать минимальную скорость двигателя, либо производить его отключения на небольшие промежутки времени, тем самым позволяя значительно экономить электроэнергию. В частотных преобразователях M-Driver реализована функция «сна», которая позволяет отключать частотный преобразователь на низких частотах, обеспечивая экономию электроэнергии и снижение нагрузки с обмоток двигателя (на низких частотах) и частотного преобразователя. При понижении давления в системе ниже заданного уровня частотный преобразователь выходит из режима «сна» и продолжает работу. Для настройки режима «сна» на частотном преобразователе необходимо запараметрировать следующие параметры:
P8-49 = 22Гц (частота пробуждения)
P8-50 = 5сек (задержка пробуждения)
P8-51 = 21Гц (частота засыпания)
P8-52 = 5сек (задержка засыпания)
PA-28 =1 (постоянная работа ПИД, даже после отключения двигателя)
Применение частотных преобразователей становится необходимостью в современное время и стремительное развитие технологий. Частотные преобразователи M-Driver могут быть внедрены в различные по сложности системы автоматизации с каскадным пуском насосов, чередованием работы двигателей по наработке, удаленным управлением и мониторингом.
Методика настройки цифрового ПИД-регулятора

Обычно, при использовании пропорционально- интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю.Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
 |
| Математическое выражение ПИД-регулятора |
где:
Xp — полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд — постоянная времени дифференцирования
∆Ei — разность ошибок соседних измерений (Ei — Ei-1)
∆tизм — время между соседними измерениями (ti — t i-1)
Ти — постоянная времени интегрирования
 — Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
— Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “Параграф PL20”.
 |
| Рис. 1 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) – это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp – зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP — Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти – постоянная времени интегрирования.
Тд – постоянная времени дифференцирования.
Текущая мощность – это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность – это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
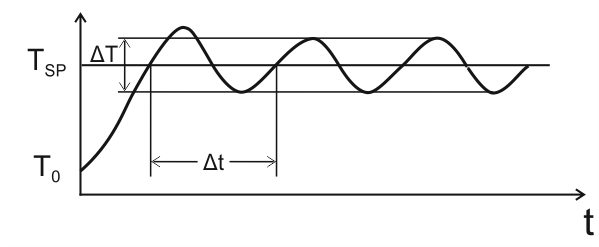
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
 |
| Рис. 2 |
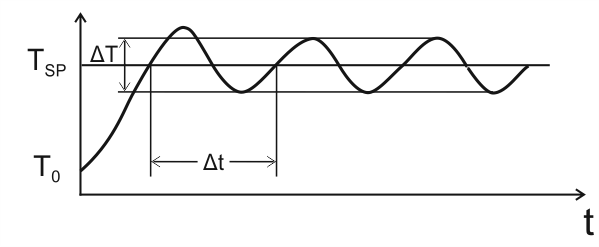
Т0 — начальная температура в системе;
ТSP — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
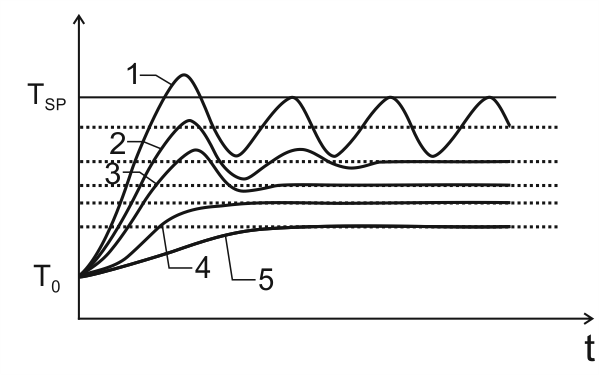
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
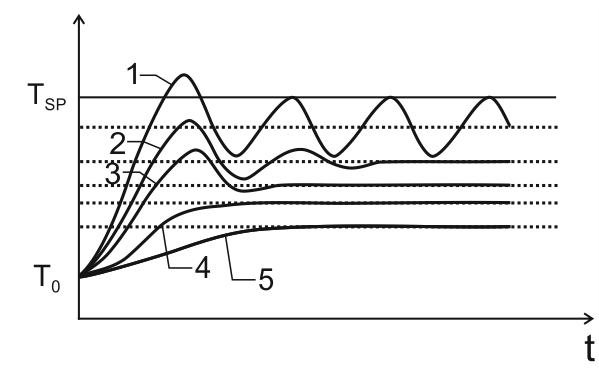 |
| Рис. 3 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 — 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 — 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
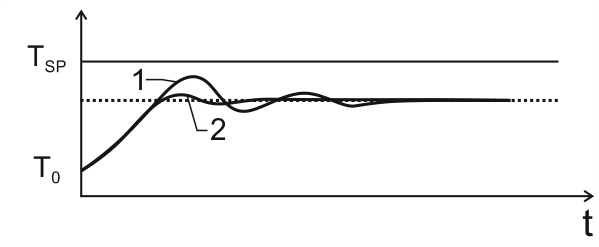
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
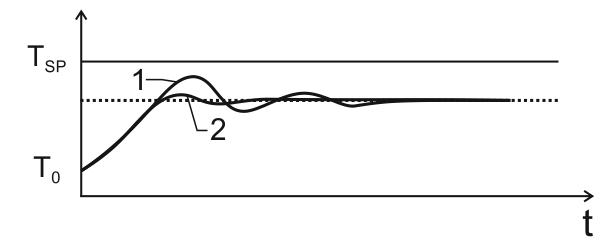 |
| Рис. 4 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
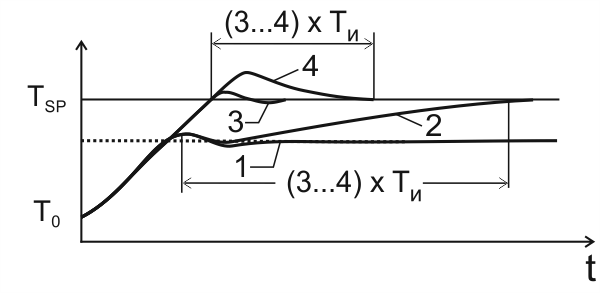 |
| Рис. 5 |
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.
Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org
Методика настройки цифрового ПИД-регулятора
Методика настройки цифрового ПИД-регулятора
Общие сведения
Обычно, при использовании пропорционально-интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю. Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
| Математическое выражение цифрового ПИД-регулятора |
 |
где:
Xp — полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд — постоянная времени дифференцирования
∆Ei — разность ошибок соседних измерений (Ei — Ei-1)
∆tизм — время между соседними измерениями (ti — t i-1)
Ти — постоянная времени интегрирования
 — Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
— Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “ПАРАГРАФ PL20”.
| Рис. 1 |
 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) – это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp – зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP — Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти – постоянная времени интегрирования.
Тд – постоянная времени дифференцирования.
Текущая мощность – это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность – это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
| Рис. 2 |
 |
Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
| Рис. 3 |
 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 — 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 — 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Этот тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
| Рис. 4 |
 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.






Пацаны, настраивал Зонт на пид-регуляторе – сначала запутался, но потом подцепил правильные параметры, и аппарат зашкалил по стабильности! В реале, на работе круто выручил, когда нужно было четко поддерживать температуру без дерганий. Настройка реально рулит.