Can h can l что это?
Can h can l что это?
Диагностика и ремонт: CAN — шина
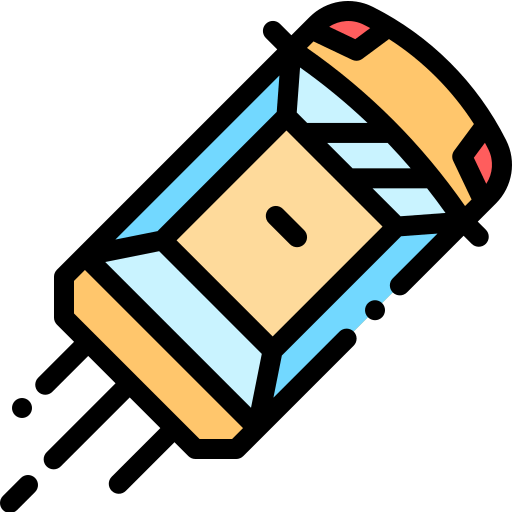
Именно так выглядит ( в основном) та самая «шина CAN «, с которой в последнее время нам придется сталкиваться все чаще и чаще:

Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
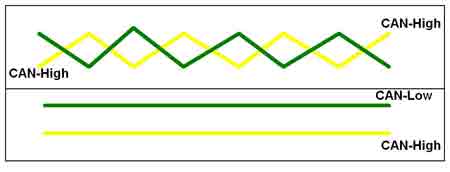
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN , определяемых выполняемыми ими функциями:
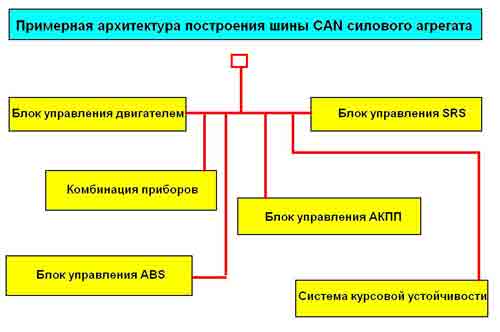
Шина CAN силового агрегата (быст рый канал ) .
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медле нный канал ) .
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно — командной системы (медленн ый канал ), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами ) .
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH ).
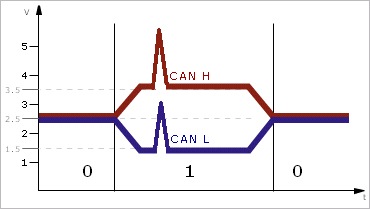
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

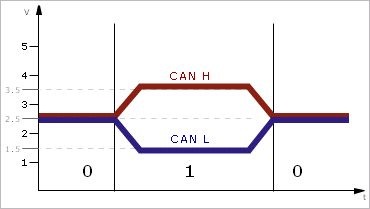
Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair . А провода, которые образуют эту пару, называются CAN High и CAN Low .
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:

Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
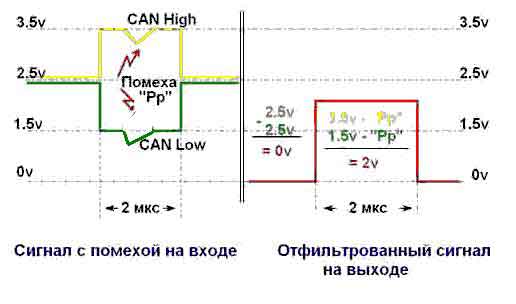
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – » Pp «) вычитается из напряжения
на проводе High (3,5 В – » Pp «) и в обработанном сигнале помеха отсутствует ( » Pp » — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Вас также может заинтересовать:
Шина CAN — это страшно?
Ох эти три буквы… Спокойно, всё пристойно, я про CAN.

CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
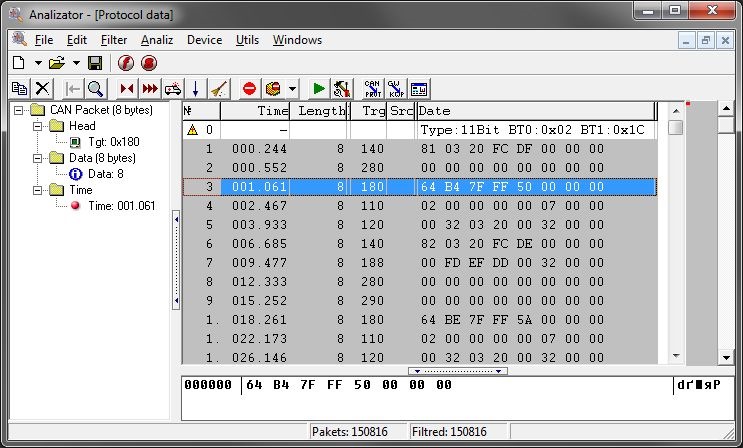
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
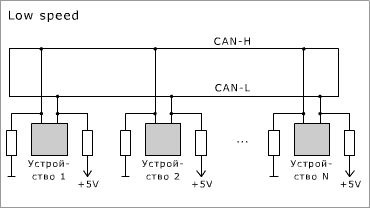
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
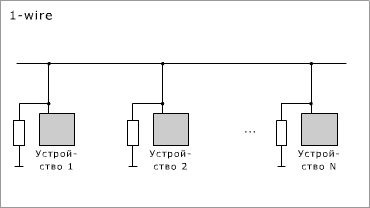
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
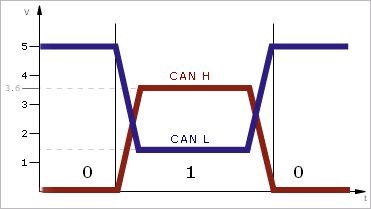
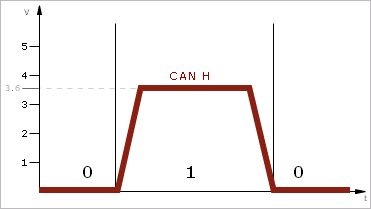
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Вот такие пироги. Наткнулся тут : quantexlab
Что такое CAN-шина, для чего она нужна и как работает в автомобиле?
Сегодня, все современные автомобили, учитывая огромное множество различных электронных систем и датчиков, становятся большими компьютерами на колесах. Чтобы упорядочить управление электронных систем в авто, была придумана CAN-шина. Давайте постараемся понятье ее принципы работы и что это вообще такое.
Немного истории про автомобильную CAN шину.
Самые первые автомобили обходились без мозговых центров, но и времена тогда были соответствующие. Двигатель автомобиля на тот момент запускался при помощи магнитно-электрического устройства, преобразовывая кинетические энергии в электрическую.
Но с развитием машиностроительной индустрии, автомобили все больше и больше опутывались проводами, а с 1970 годов, по количеству встроенных датчиков автомобиль начал соперничать с самолетом. И чем больше различных электронных опций или устройств размещалось в автомобиле, тем острее становился вопрос о рационализации электрических цепей в автомобиле.
В момент микропроцессорной революцией решение проблемы стало возможным:
Всем знаменитый немецкая компания «Bosch» в 1983 году, приступила к разработке скоростного протокола данных для автомобилестроения. Тремя годами позже, в Детройте на конференции был официально анонсировано устройство под названием CAN (от англ. Controller Area Network — сеть пространства датчиков).
Первыми вариантами чудо устройства в 1987 году по реализации продукции, занялись крупные компании «INTEL» и «FILIPS», а годом позже в 1989 году , компания BMW выпустила первый автомобиль «BMW 8-й серии», на которой датчики были сконструированы при помощи CAN.
 BMW 8 Series E31 (1989-1999) – убийца Феррари
BMW 8 Series E31 (1989-1999) – убийца Феррари
Тремя годами позже, а именно 1991 году, компания «Bosch» добавила в устройства новые технологии, обновив тем самым существующий стандарт.
Далее, примерно в 1993 году стандарт «CAN» получил международный классификатор «ISO» и вышел уже на всемирную арену.
И после непродолжительного времени, а именно 2001 году в Европе автомобили стали оснащаться CAN-шиной в обязательном порядке, а в 2012 году был выпущен автомобиль с повышенной скорости передачи данных. В связи с колосальными изменениями, автомобили стали оснащаться различными, умными электронными устройствами, а организовывал работу различных датчиков и устройств так называемый CAN блок, с этого момента пошла эра цифровых автомобилей.
 1991 году, компания «Bosch» добавила в устройства новые технологии.
1991 году, компания «Bosch» добавила в устройства новые технологии.
Принципы работы CAN-шины
Сама по себе CAN шина – это микро чип, обеспечивающий всю работу программной электроники по 2 проводам CAN_H (Сan-High) / CAN_L (Can-Low) с высокой передачей данных. По каждому из провода передается больше сотни различных управляющих сигналов одновременно, коммутируя между собой различные устройства и контролеры в автомобиле, но и тут предел устройства не ограничивается, при необходимости увеличения потока данных, сигнал может быть усилен до необходимого для этого уровня.
Функционал технологии CAN-шины:
- Фоновый режим – в момент выключенной системы, на микро чип CAN-шины продолжает питание, но это не страшно, уровень потребления электричества в фоновом режиме не высок примерно 2Ma – 3Ma доли миллиампер.
- Старт системы – в момент поворота ключа или нажатия на кнопку «STATR» система оживает, включая при этом режим стабилизации питания с блоков или поступающие на различные управляющие автомобилем датчики.
- Работа в обычном режиме – автомобильные контроллеры обмениваются между собой нужной для автомобиля и водителя информацией, например — диагностической или текущей, при этом уровень потребления питания на пиковых нагрузках может возрасти до «85 Ma» миллиампер.
- Режим сна CAN модуля – как только прекращается эксплуатация автомобиля различные датчики «CAN-шины» системы отсоединяются от электрической сети и переходят в режим спячки до следующего запуска.
Автомобиль и CAN-шина
Применение скоростной CAN-шины в автомобиле строении является главным связующим звеном совершенно всех электрических цепей в автомобиле, ее действия как позвоночник у человека, соединяющий весь функционал движения тела в целом, благодаря чему и достигается скоростная обработка данных проходимых по сети.
 Что такое CAN-шина.
Что такое CAN-шина.
Современные автомобили обладают огромным количеством пот датчиков, датчико-пот датчиков соединенных в единую цифровую автомобильную сеть CAN, объединяя следующие устройства:
- Двигатель ;
- Коробка переключения передач (МКПП / АКПП);
- Система безопасности автомобиля «Аирбэги» и их датчики (коротко, «подушки безопасности»);
- Система блокировки и антиблокировки автомобиля;
- Различные усилитель управления рулем;
- Зажигание;
- Приборка;
- Различные контроллеры, например, определяющие давление в шинах;
- Системы складывания зекрал заднего вида и очистки стекол;
- Мультимедийно-навигационная системы автомобиля;
- Бортовой компьютер;
- Сигнализация да все что есть в автомобиле, так или иначе работая по средством проводки.
CAN-шина в других отраслях.
Простота технологии и высокая скорость передачи и обработки данных CAN стала распространятся не только в автомобилестроении, CAN-шина стала применятся в таких областях, как:
- Велосипедном производстве, напрмер, знаменитая Японская компания «Симано» в 2009 году, анонсировала велосипед с системой многоуровневого управления переключения скоростей по принципу CAN. Последовав этому размному решению, компания Байон-ИКС применил CAN-шину для системного прямого привода.
- Также технология получила распространение и на бытовом уровне, при реализации системы «умного дома», стала активно применяться технология по принципу CAN-шины. Огромное количество электронных устройств, могут решать свои задачи при помощи сети интрнет и совершенно без человеческого вмешательства, например – системы охраны периметра дома (видеонаблюдение, сигнализации, датчики света, движения и пр..), полив травы, кондиционирование в помещение, да все что может подключаться к питанию.
Примечание! И это еще не предел, CAN шина обязательно помимо основного своего направления – автомобили и умного дома (а автомобиль, своего рода второй дом!), найдет и своего потребителя в других областях.
Преимущества CAN-шины и недостатки.
Положительные качества CAN шины в автомобиле строении:
- Высокая скорость обработки информации, система обладает возможностью работы даже в условиях жесткого «цейтнота» (недостаток времени для обдумывания ходов);
- Простота установки и копеечная стоимость при проведении работ с блоком;
- Помехоустойчиво (что важно в автомобиле);
- В процессе входа-выхода данных, многоуровневая система позволяет избежать огромного количества ошибок в процессе эксплуатации;
- Учитывая возможность работать в условиях повышенной передачи данных, CAN-шине легко приспособиться к любой ситуации;
- CAN-шина обладает высоким уровнем безопасности автомобиля с блокировкой всех двигательных систем стороннего проникновения и идеальная коммутируемость с автосигнализацией и иммобилайзером;
- Палитра и многообразие стандартов CAN-шины, позволяет внедрять эту технологию даже в самый дешевый автомобиль.
 Комплексная система защиты на базе IGLA.
Комплексная система защиты на базе IGLA.
Как и любой электронной системе, у высокоскоростной CAN-шины есть много различных направлений развития и естественно имеются слабые стороны, а именно:
- Объем обрабатываемой информации, доступный для передачи данных одновременно ограничен учитывая современные технологии и требования различных систем;
- Большая часть обладает техническим и служебным назначением, а на более полезные данные отводится крохотная часть трафика в сети (есть к чему стремиться, я думаю это временно);
- Не стандартизирован протокол высшего уровня.
Выводы: всеми любимая и очень круто-популярная немецкая компания «BOSCH» является изобретателем не только свечи зажигания двигателя внутреннего возгорания с топливным фильтром, но и, так сказать «внутри автомобильный интернет» для большущего количества автомобильных датчиков с именем «CAN-шина» и не смотря на все узнаваемость CAN-шины совсем недавно, этому детищу примерно уже 30 лет отроду.
Can шина принцип работы
Что такое CAN-шина
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике «шиной» называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления. Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. «Комфортные» нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Такая схема подключения устройств называется параллельной схемой подключения. Для достижения максимальной скорости волновые сопротивления блоков должны согласовываться. Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Все сообщения, которые передаются по шине, имеют определенный цифровой код.
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Видео «Диагностика авто с помощью CAN шины»
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
II — резистор сопротивления;
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Новичку о подключении к CAN шине
Для работы с CAN шиной автомобиля необходимо знать:
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
Скорости работы CAN шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Моторшасси – 500 кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- BMW : МоторШасси – 500кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- Mercedes-Benz : МоторШасси – 500 кбитс, Комфорт 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Ford, Mazda : МоторШасси – 500 кбитс, Комфорт 125 кбитс. (Для Ford может быть больше вариантов)
- KIAHyundai : МоторШасси – 500 кбитс, Комфорт 125 кбитс, 500 кбитс, Мультимедиа: 125 кбитс, 500 кбитс., Диагностика: 500 кбитс.
- GM : МоторШасси – 500 кбитс, Комфорт: 33.333 кбитс, 95.2 кбитс, Диагностика: 500 кбитс.
- Toyota, Nissan, Honda, Subaru, Suzuki : 500 кбитс (может использоваться гейтвей)
- Mitsubishi : МоторШасси: 500 кбитс, СалонКомфорт – 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Volvo : МоторШасси: 500 кбитс, СалонКомфорт – 500 кбитс, 125 кбитс, Диагностика: 500 кбитс.
- Renault : 500 кбитс
- Peugeot : МоторШасси – 500 кбитс, Комфорт 125 кбитс.
- Lada : 500 кбитс
- Коммерческая и специальная техника : Стандарт J1939 250 или 500 кбитс.
Сегментация CAN шины по функциональному назначению
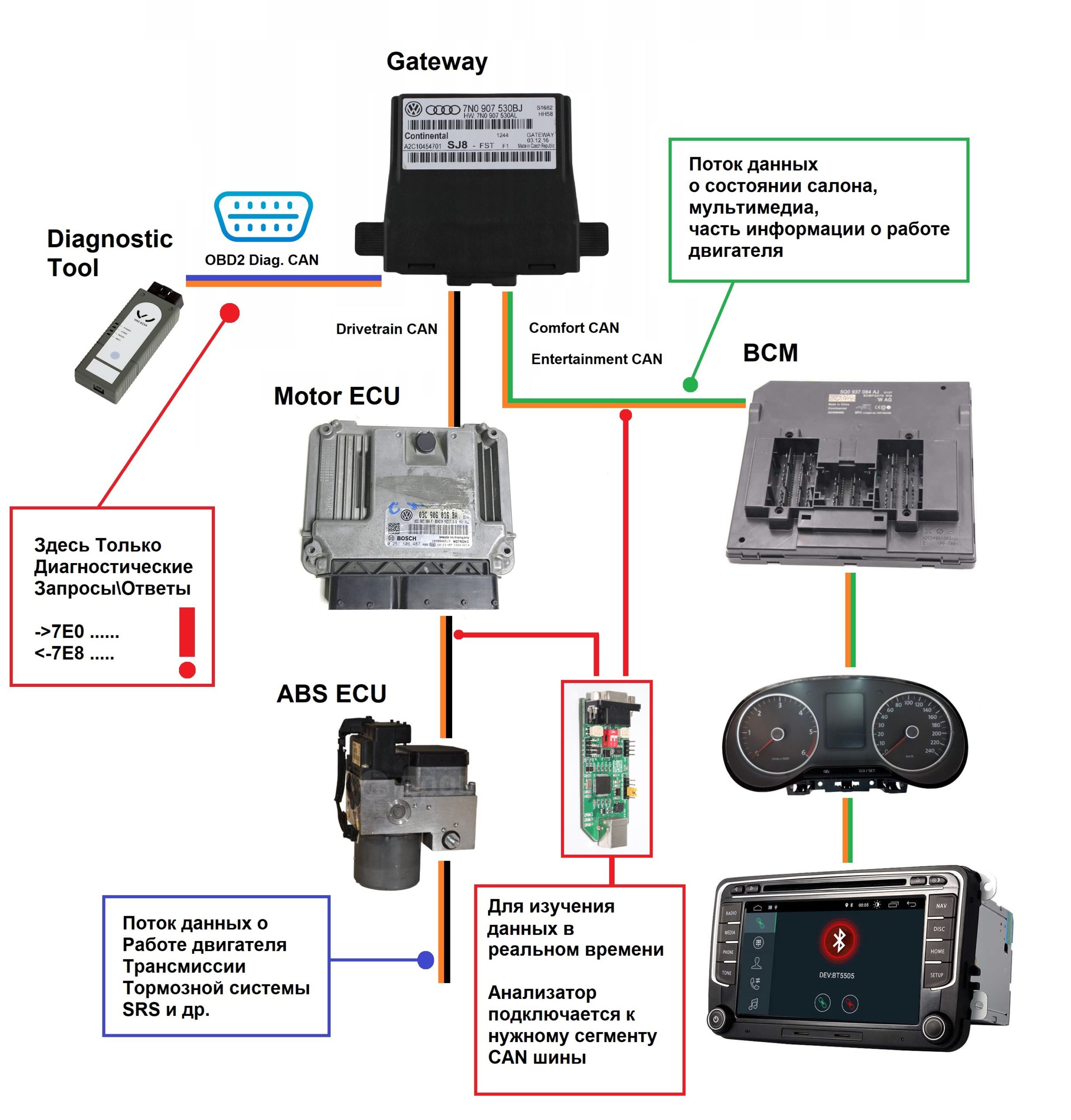
- Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
- В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
- Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
- ВАЖНО: На многих автомобилях (особенно VAG, MB, BMW) CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея, поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем гейтвеем оборудованы автомобили японских марок с 2016..2018 годов в зависимости от модели.
- ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
1 ISO11898-2 или CAN-High Speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом. 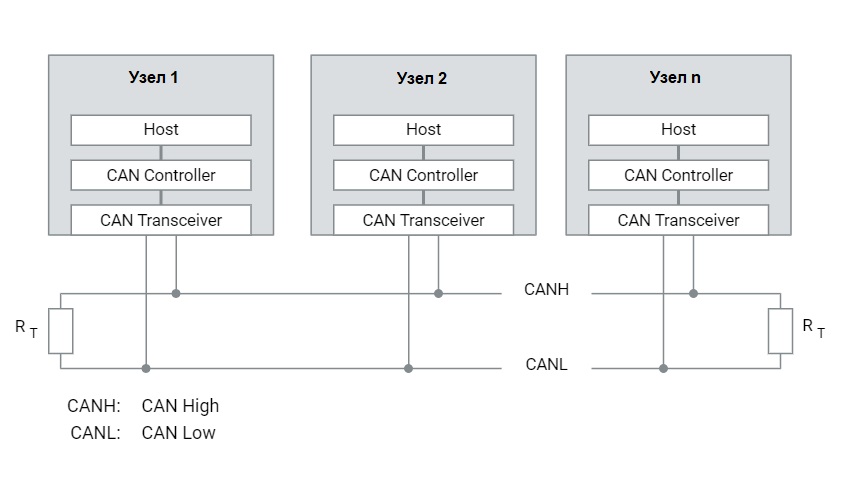
В этом случае уровни на шине CAN выглядят так: 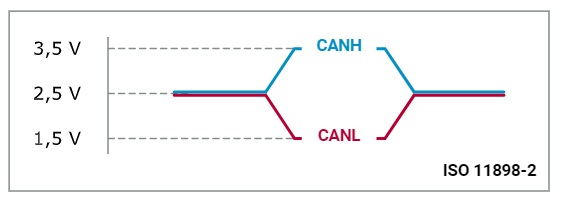
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбитс и выше. (Но могут быть исключения) .
2 ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
В этом варианте используется та же витая пара, но линии CAN-Low и CAN-High подтянуты к напряжению питания и массе соответственно.
Подробное описание FT-CAN по ссылке  Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбитс.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбитс.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Подробнее в нашей статье о FT-CAN – ссылка. 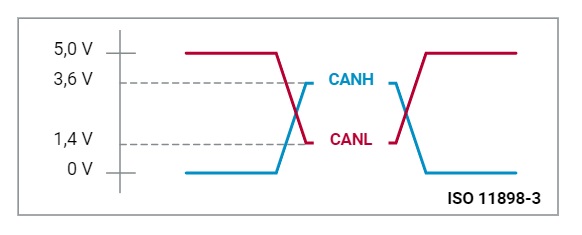
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети СалонКомфортМультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
3 Single Wire CAN или SW-CAN
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбитс
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массеземле. 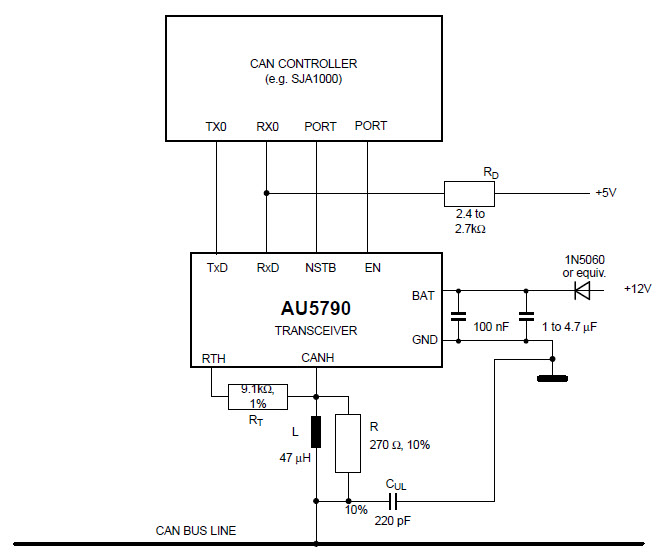






Прикол! Помню, как сама разбиралась с Can h can l. Долго вникала, думала, что это какая-то магия. А оказалось, всего лишь вопрос-ответ в английском. Но в итоге, так и не забыла эту крутую фишку! Главное — не бояться спрашивать!
Согласна, это реально как загадка сначала! У меня был такой же случай с временами – думала, что не врублюсь никогда. Но с каждой ошибкой становилось всё яснее. Главное, просто не пасовать и учиться на своих фейлах! Классно, что у тебя всё запомнилось!
Ха, да, такие заморочки с временами могут здорово запутать! У меня тоже было подобное – с грамматикой возился и думал, что все пропало. Но, как ты говоришь, с каждым косяком всё больше понимал. Главное, не терять настрой! В конце концов, учёба – это же прикольно!
Согласен на все сто! Помню, как в универе мучился с временами, казалось, не разобраться. Но чем больше ошибок, тем больше опыта. Главное, не бояться фейлов, ведь так мы и растём. Учёба, правда, иногда веселее, чем кажется!